
Mavis, Teknodrom firması ile başlattığı robot yönlendirme ve parça bulma yakalama ayıklama çalışmalarına yeni bir boyut ekledi. Robotun yakalayacağı parçaları öğrenebilmesi için son derece pratik bir arayüz geliştirildi.

Sistemin Çalışması
Öncelikle kameranın dış etkenlerden (değişken ışık kaynakları, gün ışığı vb.) etkilenmemesi için düzgün aydınlatılmış bir ortam oluşturulur. Bu ortam robotun çalışmasını engellemeyecek şekilde yapılmalıdır.
1. İşlem olarak, kameraya yakalayacağı parçalar öğretilir. Her parça farklı bir yerinden tutulmak istenebilir. Tutma noktası parçanın belirli köşeleri, uçları gibi daha önceden tahmin edilemeyen bir yer olabilir. Robot operatörü, parçanın ideal tutma noktasını, kameralı görüntü işleme yazılımında bir değişiklik istemeden (programlamaya ihtiyaç olmadan) kolayca gösterebilmelidir. (Programa tutma noktası öğretilmelidir) Programda hiç değişiklik yapılmadan son derece kolay bir arabirimde (UI) parçalar sisteme tanıtılabilmelidir. Mavis’in kendi geliştirdiği sistem bu sorunu en kolay şekilde çözmüştür.

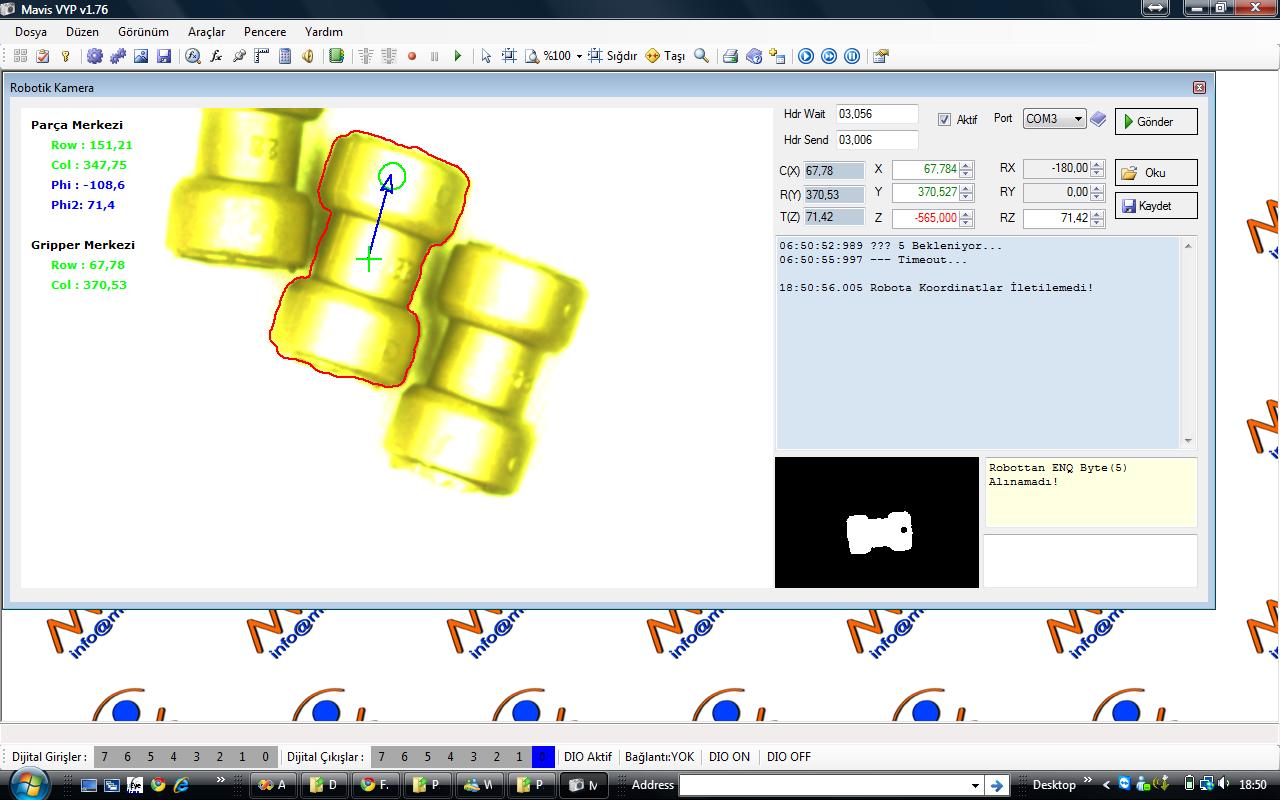
Menüden “yeni parça öğretme” işlemi seçildiğinde, kameranın altında bulunan parçanın resmi ekranda belirir. “Öğretme İşlemine Başlamak İstiyor musunuz?” sorusuna Evet dendiğinde, interaktif bir şekilde tutma noktası kullanıcıdan alınır.
 Öğretilecek parçanın en ideal parça olmasına özen gösterilir. Buna rağmen ekranda parça sınır çizgileri belirlenir ve kenar iyileştirme algoritmaları ile çapak ve pürüzler ön işlemden geçirilerek temizlenir.
Öğretilecek parçanın en ideal parça olmasına özen gösterilir. Buna rağmen ekranda parça sınır çizgileri belirlenir ve kenar iyileştirme algoritmaları ile çapak ve pürüzler ön işlemden geçirilerek temizlenir.

Bu noktada sistem parçanın modellenmiş ve temizlenmiş halini model kodu ile kaydeder. Herhangi bir görüntü işleme programı ile (Paint, Photoshop vb.) bu modellenmiş fotoğraf üzerinde daha da hassas çalışmalar yapılabilir. (Filtreleme, yuvarlatma, kenarları düzleştirme vb.)
Üstelik, tüm bu işlemler gerçek parça resmi yerine parçanın direk CAD çizimi baz alınarak ta yapılabilir.
Program çalışma anında, öğretilen parçayı tanıyacak ve tutma noktasının koordinatlarını ve açılarını robota iletecektir.

Sistem tüm robotlarla haberleşebilecek altyapıya göre tasarlanmıştır. Testler ve uyarlamalar Teknodrom firmasında Motoman Robot kullanılarak yapılmıştır. Haberleşme olarak seri port ve dijital Input/output modülü kullanılmıştır. Ethernet haberleşme için de arayüz geliştirilmiştir. Sistem Fanuc, kuka gibi robotlar ile de çalışabilecek şekildedir. Test ve geliştirmeler; Teknodrom firmasından Emrah Hünerlitürkoğlu, Mavis firmasından Mustafa Sarı ve Hüseyin Çelik tarafından gerçekleştirilmiştir.